publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2025
-
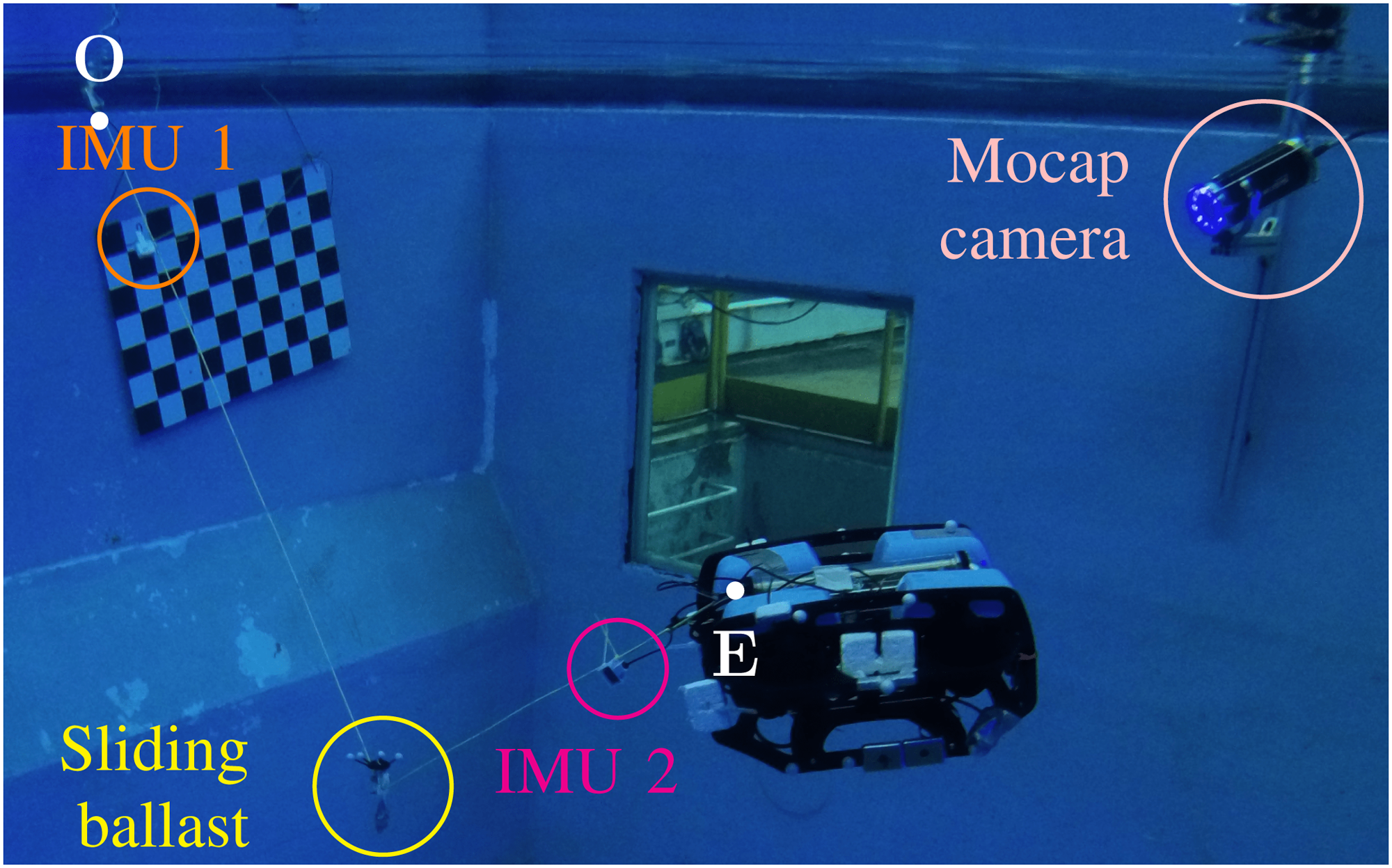 ROV Localization Using Ballasted Umbilical Equipped With IMUsJuliette Drupt, Christophe Viel, Claire Dune, and 1 more authorIEEE Journal of Oceanic Engineering, 2025
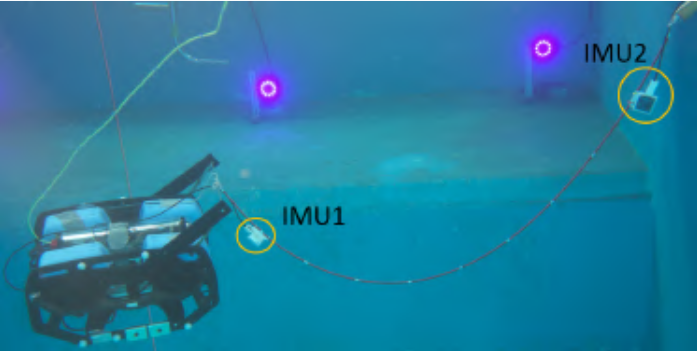
ROV Localization Using Ballasted Umbilical Equipped With IMUsJuliette Drupt, Christophe Viel, Claire Dune, and 1 more authorIEEE Journal of Oceanic Engineering, 2025This article describes an affordable and setupfriendly cable-based localization technique for underwater remotely operated vehicles, which exploits the piecewise linear shape of the umbilical being equipped with a sliding ballast. Each stretched part of the cable is instrumented with a waterproof inertial measurement unit (IMU) to measure its orientation. Using the cable’s geometry, the vehicle’s location can be calculated in relation to the fixed or moving end of the cable. Experiments carried out with a robotic system in a water tank prove the reliability of this localization strategy. The study investigates the influence of measurement uncertainties on cable orientation and length, as well as the impact of the IMU location along the cable on localization precision. The accuracy of the localization method is discussed.
@article{drupt_rov_2025, title = {{ROV} {Localization} {Using} {Ballasted} {Umbilical} {Equipped} {With} {IMUs}}, copyright = {All rights reserved}, issn = {0364-9059, 1558-1691, 2373-7786}, url = {https://ieeexplore.ieee.org/document/10914511/}, doi = {10.1109/JOE.2024.3467448}, language = {en}, urldate = {2025-03-07}, journal = {IEEE Journal of Oceanic Engineering}, author = {Drupt, Juliette and Viel, Christophe and Dune, Claire and Hugel, Vincent}, year = {2025}, pages = {1--20}, } -
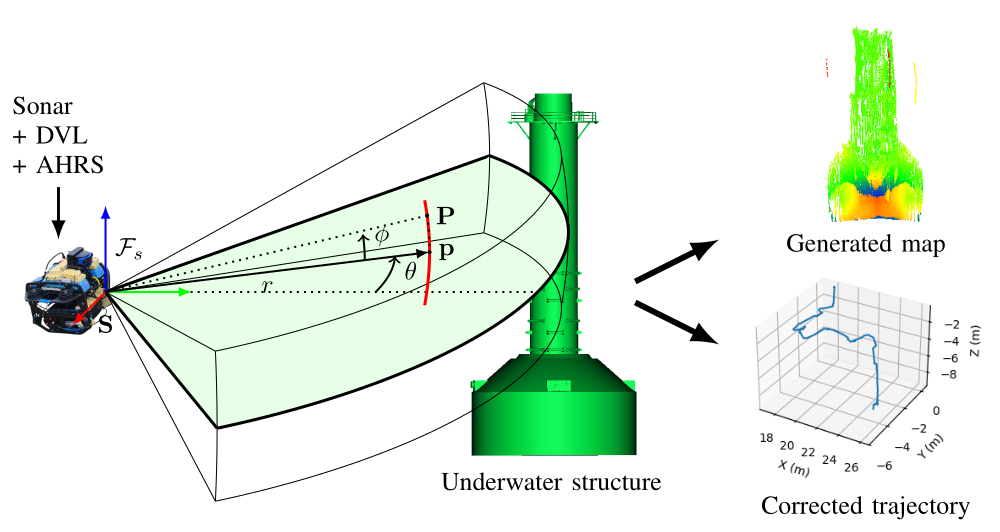 3DSSDF: Underwater 3D Sonar Reconstruction Using Signed Distance FunctionsSimon Archieri, Juliette Drupt, Ahmet Cinar, and 4 more authorsIn 2025 IEEE International Conference on Robotics and Automation (ICRA), May 2025
3DSSDF: Underwater 3D Sonar Reconstruction Using Signed Distance FunctionsSimon Archieri, Juliette Drupt, Ahmet Cinar, and 4 more authorsIn 2025 IEEE International Conference on Robotics and Automation (ICRA), May 2025Underwater autonomous robotic operations require online localization and 3D mapping. Because of the absence of absolute positioning underwater, these tasks strongly rely on embedded sensors, including proprioceptive or navigation sensors — which can be fused for an odometry, — and exteroceptive sensors. One of the most popular exteroceptive sensors for underwater is the imaging sonar, which emits a large fan-shaped acoustic signal and estimates the position of the surrounding obstacles from a measure of the reflected signal. This paper addresses underwater online localization and 3D mapping using a forward looking, wide-aperture imaging sonar and vehicle’s intrinsic navigation estimates. We introduce 3DSSDF (3D Sonar Reconstruction Using Signed Distance Functions), a new localization and 3D mapping algorithm based on signed distance functions, which is evaluated in simulation and on real data, in man-made and natural environments. Comparisons to reference trajectories and maps demonstrate that, in our tests, 3DSSDF efficiently corrects navigation drift and that trajectory and map accuracy is always below 1 m and below 1% of the distanced travelled, which can be sufficient for the safe inspection of natural or artificial underwater structures.
@inproceedings{archieri_2025, address = {Atlanta, UK}, title = {3DSSDF: Underwater 3D Sonar Reconstruction Using Signed Distance Functions}, language = {en}, booktitle = {2025 {IEEE} {International} {Conference} on {Robotics} and {Automation} ({ICRA})}, publisher = {IEEE}, author = {Archieri, Simon and Drupt, Juliette and Cinar, Ahmet and Grimaldi, Michele and Carlucho, Ignacio and Scharff Willners, Jonatan and Yvan R., Pétillot}, month = may, year = {2025}, }
2024
-
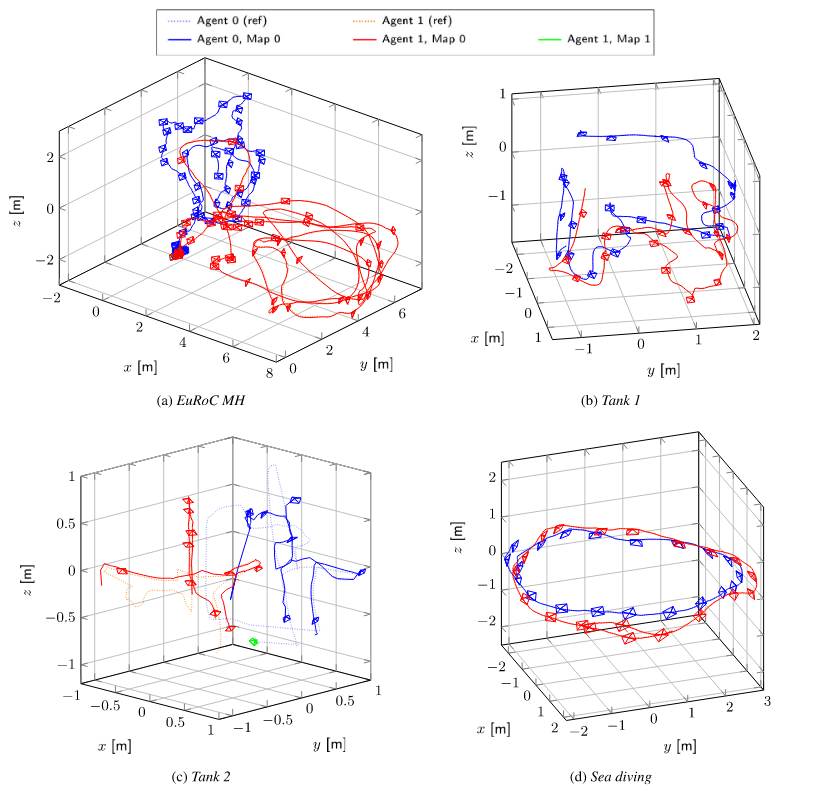 MAM 3 SLAM: Towards underwater-robust multi-agent visual SLAMJuliette Drupt, Andrew I. Comport, Claire Dune, and 1 more authorOcean Engineering, Jun 2024
MAM 3 SLAM: Towards underwater-robust multi-agent visual SLAMJuliette Drupt, Andrew I. Comport, Claire Dune, and 1 more authorOcean Engineering, Jun 2024Some underwater applications involve deploying multiple underwater Remotely Operated Vehicles in a common area. Such applications require the localization of these vehicles, not only with respect to each other but also with respect to a previously unknown environment. To this end, this work presents MAM3SLAM, a new fully centralized multi-agent and multi-map monocular Visual Simultaneous Localization And Mapping (VSLAM) framework. Multi-agent evaluation metrics are introduced to provide an extensive evaluation of MAM3SLAM compared to the state-of-the-art multi-agent VSLAM on four two-agent scenarios: one standard airborne dataset and three new underwater datasets recorded in a pool and the sea. The results show that MAM3SLAM is robust to underwater visual conditions and tracking failures, outperforms the other evaluated methods in estimating the individual and relative poses of the agents and in collaborative mapping accuracy. MAM3SLAM successfully estimates the individual and relative localization of the agents with an error lower than 5 cm on three out of the four test sequences, and is twice as accurate as competing multi-agent works in challenging visual conditions with frequent visual dropouts, poor textures, low framerate and fast motion. MAM3SLAM’s source code is made available, as are the underwater datasets.
@article{drupt_mam_2024, title = {{MAM} 3 {SLAM}: {Towards} underwater-robust multi-agent visual {SLAM}}, volume = {302}, copyright = {All rights reserved}, issn = {00298018}, shorttitle = {{MAM} 3 {SLAM}}, url = {https://linkinghub.elsevier.com/retrieve/pii/S0029801824009806}, doi = {10.1016/j.oceaneng.2024.117643}, language = {en}, urldate = {2024-04-09}, journal = {Ocean Engineering}, author = {Drupt, Juliette and Comport, Andrew I. and Dune, Claire and Hugel, Vincent}, month = jun, year = {2024}, keywords = {slam, underwater}, pages = {117643}, } -
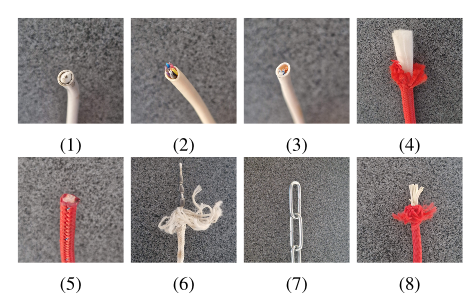 An Augmented Catenary Model for Underwater Tethered RobotsMartin Filliung, Juliette Drupt, Charly Peraud, and 5 more authorsIn 2024 IEEE International Conference on Robotics and Automation (ICRA), May 2024
An Augmented Catenary Model for Underwater Tethered RobotsMartin Filliung, Juliette Drupt, Charly Peraud, and 5 more authorsIn 2024 IEEE International Conference on Robotics and Automation (ICRA), May 2024This paper examines the relevance of using catenary-based curves to model cables in underwater tethered robotic applications in order to take into account the influence of hydrodynamic damping. To this end, an augmented catenarybased model is introduced to deal with the dynamical effects of surge motion, sway motion or a combination of both on a cable. Experimental studies are carried out with eight cables of varying stiffness, weight and buoyancy. One end of the cable is fixed, while the other end is moved by the underwater robot. The obtained results help to determine which cables and which dynamics are compatible with a fair estimation of the cable shape through the proposed models.
@inproceedings{filliung_augmented_2024, address = {Yokohama, Japan}, title = {An {Augmented} {Catenary} {Model} for {Underwater} {Tethered} {Robots}}, copyright = {https://doi.org/10.15223/policy-029}, isbn = {979-8-3503-8457-4}, url = {https://ieeexplore.ieee.org/document/10611132/}, doi = {10.1109/ICRA57147.2024.10611132}, language = {en}, urldate = {2024-09-23}, booktitle = {2024 {IEEE} {International} {Conference} on {Robotics} and {Automation} ({ICRA})}, publisher = {IEEE}, author = {Filliung, Martin and Drupt, Juliette and Peraud, Charly and Dune, Claire and Boizot, Nicolas and Comport, Andrew and Anthierens, Cedric and Hugel, Vincent}, month = may, year = {2024}, pages = {6051--6057}, }
2023
-
 Estimation de forme de câble pesant pour la localisation de robots sous-marins encordés : comparaison d’une approche visuelle à une nouvelle approche inertielleJuliette Drupt, Claire Dune, Andrew I. Comport, and 1 more authorIn ORASIS 2023, May 2023
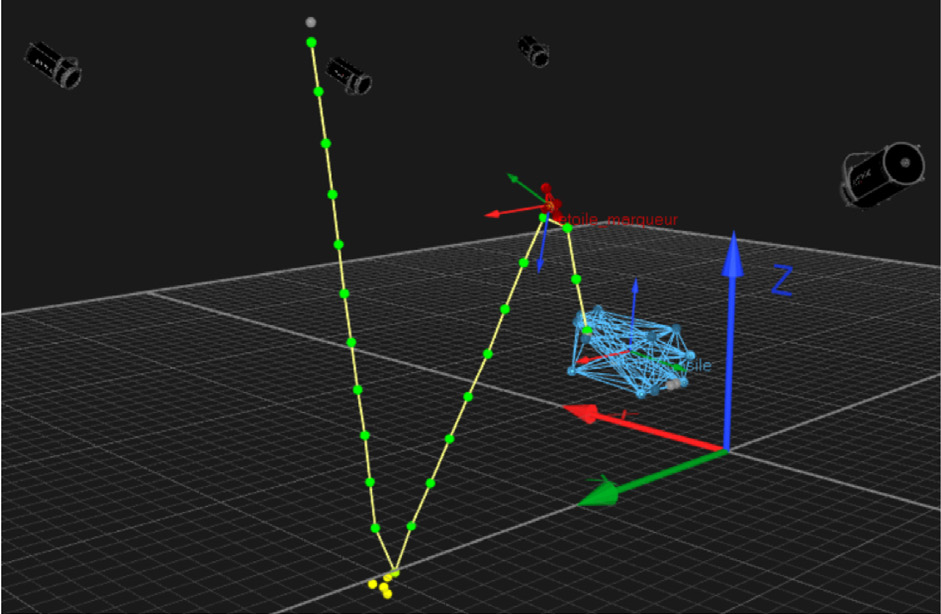
Estimation de forme de câble pesant pour la localisation de robots sous-marins encordés : comparaison d’une approche visuelle à une nouvelle approche inertielleJuliette Drupt, Claire Dune, Andrew I. Comport, and 1 more authorIn ORASIS 2023, May 2023Cet article s’intéresse à l’estimation de la forme d’un câble coulant modélisé par une chaînette et reliant une paire de robots sous-marins au sein d’une cordée de robots. Une nouvelle méthode d’estimation exploitant des tangentes locales au câble mesurées à l’aide de centrales inertielles (IMU) est présentée, ces IMU étant placées à proximité des extrémités du câble. Cette méthode inertielle est comparée à une méthode visuelle issue de précédents travaux. L’évaluation est réalisée en bassin, avec une vérité terrain fournie par le système de capture de mouvement Qualisys. Les résultats expérimentaux montrent que la nouvelle méthode d’estimation de forme de câble présentée ici améliore de façon significative l’estimation de la flèche du câble. Par ailleurs, l’estimation n’est pas affectée par la limitation du champ de vision de la caméra ni par les singularités résultant de la projection de la forme de chaînette dans le plan image.
@inproceedings{drupt_estimation_2023, address = {Carqueiranne, France}, title = {Estimation de forme de câble pesant pour la localisation de robots sous-marins encordés : comparaison d’une approche visuelle à une nouvelle approche inertielle}, copyright = {All rights reserved}, language = {fr}, author = {Drupt, Juliette and Dune, Claire and Comport, Andrew I. and Hugel, Vincent}, booktitle = {{ORASIS} 2023}, year = {2023}, } -
 ROV localization based on umbilical angle measurementChristophe Viel, Juliette Drupt, Claire Dune, and 1 more authorOcean Engineering, Feb 2023
ROV localization based on umbilical angle measurementChristophe Viel, Juliette Drupt, Claire Dune, and 1 more authorOcean Engineering, Feb 2023If the umbilical of Remote Operated Vehicle (ROV) allows the transmission of information in real time or the supply of energy to the robot, it also has many disadvantages such as entanglement or the difficulty of predicting its shape, which raises the question of being able to do without it. In order to turn these constraints into advantages, this paper proposes a method to estimate the position of an ROV by observing the shape of its umbilical. The umbilical is equipped with moving ballasts and buoys to give it a predictable shape with straight lines: simple mathematical models of the umbilical can thus be defined. Using these models and measuring the angles at the ends of the cable, the position of the ROV can be found. Three umbilical models with different equipment are proposed. The methods were tested in a pool and the estimated position of the ROV was compared with its actual position measured using a motion capture system.
@article{viel_rov_2023, title = {{ROV} localization based on umbilical angle measurement}, volume = {269}, copyright = {All rights reserved}, issn = {00298018}, url = {https://linkinghub.elsevier.com/retrieve/pii/S0029801822028530}, doi = {10.1016/j.oceaneng.2022.113570}, language = {en}, urldate = {2023-06-27}, journal = {Ocean Engineering}, author = {Viel, Christophe and Drupt, Juliette and Dune, Claire and Hugel, Vincent}, month = feb, year = {2023}, pages = {113570}, } -
 Qualitative evaluation of state-of-the-art DSO and ORB-SLAM-based monocular visual SLAM algorithms for underwater applicationsJuliette Drupt, Claire Dune, Andrew I. Comport, and 1 more authorIn OCEANS 2023 - Limerick, Jun 2023
Qualitative evaluation of state-of-the-art DSO and ORB-SLAM-based monocular visual SLAM algorithms for underwater applicationsJuliette Drupt, Claire Dune, Andrew I. Comport, and 1 more authorIn OCEANS 2023 - Limerick, Jun 2023Visual simultaneous localization and mapping (VSLAM) is widely investigated for airborne applications, but fewer works focus on underwater VSLAM. Previous studies of state-of-the-art VSLAM in the underwater field demonstrate that while some stereo approaches are robust to underwater visual conditions, monocular ones still lack robustness to such case. The only monocular VSLAM system able to give partial but promising results in these studies are DSO and ORB-SLAM, but these methods are still limited by tracking inconsistencies or failures from which the SLAM system fails to recover. However, recent work extend the capabilities of these approaches in place recognition and tracking failure recovery. These new developments should therefore lead to better performance in underwater conditions. This paper presents an update of previous qualitative assessments by adding recent developments of monocular DSO and ORB-SLAM. The methods are evaluated in 8 underwater scenarios, considering three criteria: the percentage of the sequence for which a localization is estimated, loop closure detection success and map and trajectory consistency. The results show the interest of multi-map approaches, namely ORB-SLAM3, in improving significantly SLAM robustness to underwater challenging visual conditions.
@inproceedings{drupt_qualitative_2023, address = {Limerick, Ireland}, title = {Qualitative evaluation of state-of-the-art {DSO} and {ORB}-{SLAM}-based monocular visual {SLAM} algorithms for underwater applications}, copyright = {https://doi.org/10.15223/policy-029}, isbn = {979-8-3503-3226-1}, url = {https://ieeexplore.ieee.org/document/10244636/}, doi = {10.1109/OCEANSLimerick52467.2023.10244636}, urldate = {2024-09-23}, booktitle = {{OCEANS} 2023 - {Limerick}}, publisher = {IEEE}, author = {Drupt, Juliette and Dune, Claire and Comport, Andrew I. and Hugel, Vincent}, month = jun, year = {2023}, pages = {1--7}, } -
 Localization of an underwater robot chainJuliette DruptUniversité de Toulon, Nov 2023
Localization of an underwater robot chainJuliette DruptUniversité de Toulon, Nov 2023The current thesis focuses on the localization of a an underwater robot chain. Two different but complementary approaches are studied, including the proprioceptive localization of the chain based on and estimation of the three-dimensional state of its cable parts, using inertial measurements, and the exteroceptive, multi-agent localization of the chain with respect to its environment, using visual simultaneous localization and mapping techniques.
@phdthesis{drupt_2023_phd, author = {Drupt, Juliette}, title = {Localization of an underwater robot chain}, school = {Université de Toulon}, year = {2023}, month = nov, }
2022
-
 Validity of the catenary model for moving submarine cables with negative buoyancyJuliette Drupt, Claire Dune, Andrew I Comport, and 1 more authorIn 3rd workshop on RObotic MAnipulation of Deformable Objects: challenges in perception, planning and control for Soft Interaction (ROMADO-SI), Nov 2022
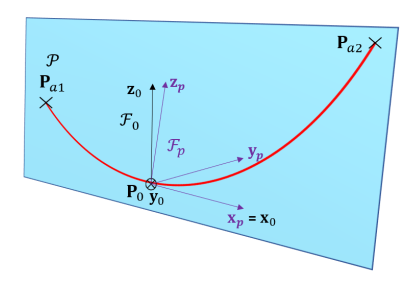
Validity of the catenary model for moving submarine cables with negative buoyancyJuliette Drupt, Claire Dune, Andrew I Comport, and 1 more authorIn 3rd workshop on RObotic MAnipulation of Deformable Objects: challenges in perception, planning and control for Soft Interaction (ROMADO-SI), Nov 2022In the field of underwater robotics, tethers are the dominant method used to provide real time communication with underwater vehicles. Estimating their shape is a key element in preventing entanglements and limiting their mechanical effects on the vehicles. In addition, the tether shape constrains the pose of the vehicle at its attachment point, and could thus be used for vehicle localization purposes given an accurate tether model. This work focuses on a simple model of flexible non-rigid hanging cables, namely the catenary model, and presents an experimental evaluation of the validity of this model to approximate the shape of dynamically moving underwater tethers with negative buoyancy using motion tracking.
@inproceedings{drupt_validity_2022, address = {Kyoto, Japan}, title = {Validity of the catenary model for moving submarine cables with negative buoyancy}, copyright = {All rights reserved}, language = {en}, author = {Drupt, Juliette and Dune, Claire and Comport, Andrew I and Hugel, Vincent}, booktitle = {3rd workshop on {RObotic MAnipulation of Deformable Objects:} challenges in perception, planning and control for {Soft Interaction} ({ROMADO-SI})}, year = {2022}, } - Inertial-measurement-based catenary shape estimation of underwater cables for tethered robotsJuliette Drupt, Claire Dune, Andrew I. Comport, and 2 more authorsIn 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2022
This paper deals with the estimation of the shape of a catenary for a negatively buoyant cable, connecting a pair of underwater robots in a robot chain. The new estimation method proposed here is based on the calculation of local tangents thanks to the data acquired from inertial measurement units (IMUs), which are attached to the cable near its ends. This method is compared with a vision-based estimation method that was developed previously. Experiments are conducted, in the air and in a pool, using a motion capture system for ground truth. The results obtained show that the new method significantly improves the estimation of the catenary height. Furthermore, the identification of the cable shape is not affected by the limits of the camera’s field of view and by the image projection, resulting in increased accuracy and range, without singularities.
@inproceedings{drupt_inertial-measurement-based_2022, address = {Kyoto, Japan}, title = {Inertial-measurement-based catenary shape estimation of underwater cables for tethered robots}, copyright = {All rights reserved}, isbn = {978-1-6654-7927-1}, url = {https://ieeexplore.ieee.org/document/9981980/}, doi = {10.1109/IROS47612.2022.9981980}, urldate = {2023-06-28}, booktitle = {2022 {IEEE}/{RSJ} {International} {Conference} on {Intelligent} {Robots} and {Systems} ({IROS})}, publisher = {IEEE}, author = {Drupt, Juliette and Dune, Claire and Comport, Andrew I. and Seillier, Sabine and Hugel, Vincent}, month = oct, year = {2022}, pages = {6867--6872}, }